


乐鑫低功耗wifi ESP32-Ethernet-Kit V1.2 入门指南
乐鑫低功耗wifi ESP32-Ethernet-Kit V1.2 入门指南
本指南将介绍 乐鑫低功耗wifi ESP32-Ethernet-Kit 开发板的配置以及相关功能的使用。
ESP32-Ethernet-Kit 是一款以太网转 Wi-Fi 开发板,可为以太网设备赋予 Wi-Fi 连接功能。为了提供更灵活的电源选项,ESP32-Ethernet-Kit 同时也支持以太网供电 (PoE)。
ESP32-Ethernet-Kit V1.2 概图
准备工作
ESP32-Ethernet-Kit V1.2 开发板
USB 数据线(A 转 Micro-B)
PC(Windows、Linux 或 Mac OS)
您可以跳过介绍部分,直接前往 应用程序开发 章节。
概述
ESP32-Ethernet-Kit 是一款来自 乐鑫 的开发板。
它由 以太网母板(A板) 和 PoE 子板(B 板) 两部分组成。其中 以太网母板(A板) 集成蓝牙/Wi-Fi 双模 ESP32-WROVER-E 模组和单端口 10/100 Mbps 快速以太网收发器 (PHY) IP101GRI。PoE 子板(B 板) 提供以太网供电功能。ESP32-Ethernet-Kit 的 A 板可在不连接 B 板的情况下独立工作。
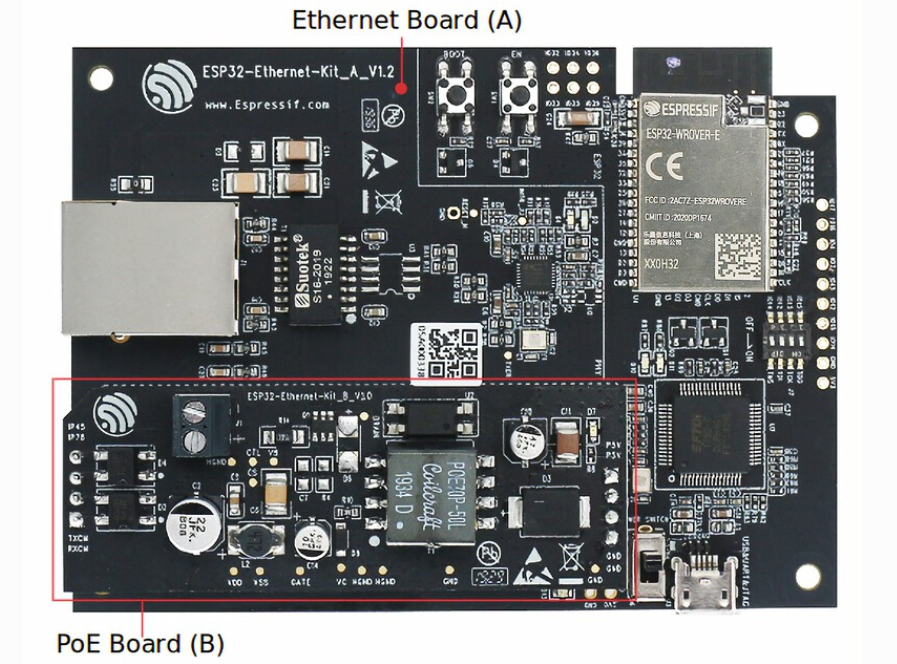
ESP32-Ethernet-Kit V1.2
为了实现程序下载和监控,A 板还集成了一款先进多协议 USB 桥接器(FT2232H 芯片)。FT2232H 芯片使得开发人员无需额外的 JTAG 适配器,通过 USB 桥接器使用 JTAG 接口便可对 ESP32 直接进行调试。
功能概述
ESP32-Ethernet-Kit 开发板的主要组件和连接方式如下。

ESP32-Ethernet-Kit 功能框图
功能说明
有关乐鑫低功耗wifi ESP32-Ethernet-Kit 开发板的主要组件、接口及控制方式,请见下方的图片和表格。
以太网母板(A 板)
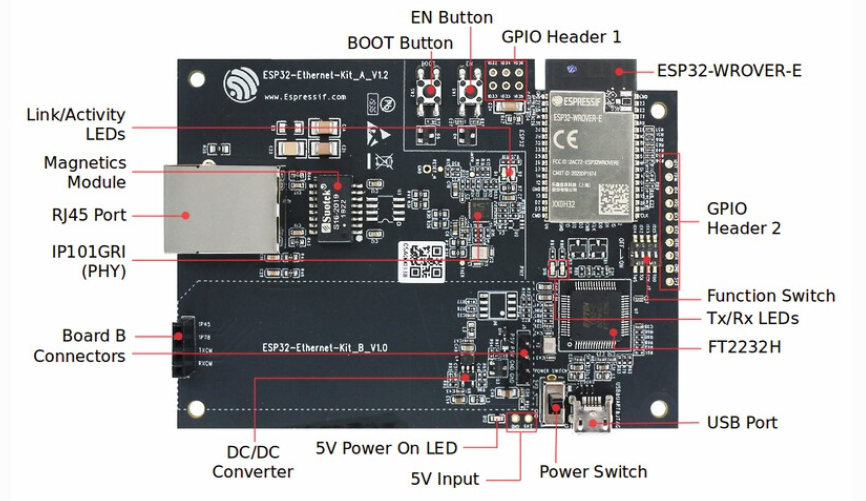
ESP32-Ethernet-Kit - 以太网母板(A 板)布局
下表将从图片右上角开始,以顺时针顺序介绍图中的主要组件。
|
表格1 组件介绍 |
|
|
主要组件 |
基本介绍 |
|
ESP32-WROVER-E 模组 |
这款 ESP32 模组内置 64-Mbit PSRAM,可提供灵活的额外存储空间和数据处理能力。 |
|
GPIO Header 2 |
由 5 个未引出通孔组成,可连接至 ESP32 的部分 GPIO。 |
|
功能选择开关 |
一个 4 位拨码开关,可配置 ESP32 部分 GPIO 的功能。 |
|
Tx/Rx LEDs |
2 个 LED,可显示 UART 传输的状态。 |
|
FT2232H |
FT2232H 多协议 USB 转串口桥接器。开发人员可通过 USB 接口对 FT2232H 芯片进行控制和编程,与 ESP32 建立连接。FT2232H 芯片可在通道 A 提供 USB-to-JTAG 接口功能,并在通道 B 提供 USB-to-Serial 接口功能,便利开发人员的应用开发与调试。 |
|
USB 端口 |
USB 接口。可用作开发板的供电电源,或连接 PC 和开发板的通信接口。 |
|
电源开关 |
电源开关。拨向 5V0 按键侧,开发板上电;拨向 GND 按键一侧,开发板掉电。 |
|
5V Input |
5V 电源接口建议仅在开发板自动运行(未连接 PC)时使用。 |
|
5V Power On LED |
当开发板通电后(USB 或外部 5V 供电),该红色指示灯将亮起。 |
|
DC/DC 转换器 |
直流 5 V 转 3.3 V,输出电流高可达 2 A。 |
|
Board B 连接器 |
1 对 排针和排母,用于连接PoE子板。 |
|
IP101GRI (PHY) |
物理层 (PHY) 单端口 10/100 快速以太网收发器 IP101GRI 芯片,允许开发人员实现与以太网线缆的物理层连接。PHY 与 ESP32 通过简化媒体独立接口 (RMII) 实现连接。RMII 是媒体独立接口(MII)的标准简化版本。PHY 可在 10/100 Mbps 速率下支持 IEEE 802.3 / 802.3u 标准。 |
|
RJ45 端口 |
以太网数据传输端口。 |
|
网络变压器 |
网络变压器属于以太网物理层的一部分,可保护电路,使其免受故障和电压瞬变影响,包括防止收发器芯片和线缆之间产生共模信号。同时它也可以在收发器与以太网设备之间提供电流隔绝。 |
|
Link/Activity LED |
2 个 LED(绿色和红色),可分别显示 PHY 处于 “Link” 状态或 “Activity” 状态。 |
|
BOOT Button |
下载按键。按下 BOOT 键并保持,同时按一下 EN 键(此时不要松开 BOOT 键)进入“固件下载”模式,通过串口下载固件。 |
|
EN 按键 |
复位按键。 |
|
GPIO Header 1 |
由 6 个未引出通孔组成,可连接至 ESP32 的备用 GPIO。 |
注解
如果采用了固件自动下载模式,则无需对 BOOT 或 EN 按键进行任何操作。
PoE 子板(B 板)
PoE 子板转换以太网电缆传输的电能 (PoE),为以太网母板(A 板)提供电源。PoE 子板(B 板)的主要组件见 功能概述 中的功能框图。
PoE 子板(B 板)具有以下特性:
支持 IEEE 802.3at 标准
电源输出:5 V,1.4 A
如需使用 PoE 功能,请用以太网线缆将以太网母板(A 板)上的 RJ45 Port 连接至 PoE 的交换机。以太网母板(A 板)检测到来自 PoE 子板(B 板)的 5 V 供电后,将从 USB 供电自动切换至 PoE 供电。

ESP32-Ethernet-Kit - PoE 子板(B 板)布局
|
表格2 PoE 子板(B 板) |
|
|
主要组件 |
基本介绍 |
|
A 板连接器 |
4 个排针(左侧)和排母(右侧),用于将 PoE 子板(B 板)连接至 Ethernet board (A)。左侧的管脚接受来自 PoE 交换机的电源。右侧的管脚为 以太网母板(A 板)提供 5 V 电源。 |
|
外部电源终端 |
PoE 子板(B 板)可选电源 (26.6 ~ 54 V)。 |
设置选项
本节介绍用于乐鑫低功耗wifi ESP32-Ethernet-Kit 开发板的硬件配置选项。
功能选择开关
拨码开关打开时,拨码开关将列出的 GPIO 路由到 FT2232H 以提供JTAG功能。拨码开关关闭时,GPIO 可以用于其他目的。
|
拨码开关 |
GPIO 管脚 |
|
1 |
GPIO13 |
|
2 |
GPIO12 |
|
3 |
GPIO15 |
|
4 |
GPIO14 |
RMII 时钟源选择
RMII 工作模式下的以太网 MAC 和 PHY 需要一个公共的 50MHz 同步时钟(即 RMII 时钟),它既可以由外部提供,也可以由内部的 ESP32 APLL 产生(不推荐)。
注解
有关 RMII 时钟源选择的更多信息,请参见 ESP32-Ethernet-Kit V1.2 以太网母板(A 板)原理图,第 2 页的位置 D2。
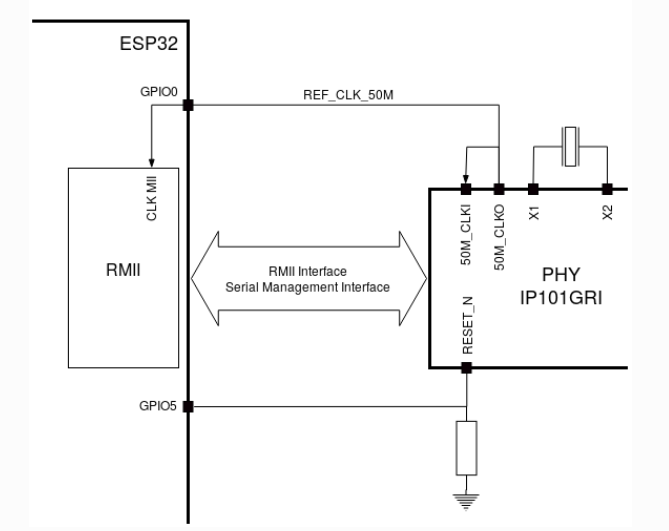
PHY 侧提供 RMII 时钟
ESP32-Ethernet-Kit 默认配置为 IP101GRI 的 50M_CLKO 信号线提供 RMII 时钟,该时钟信号由 PHY 外侧连接的 25 MHz 无源晶振经过倍频产生。详情请参见下图。
PHY 侧提供 RMII 时钟
请注意,系统上电时 RESET_N 旁的下拉电阻会将 PHY 置于复位状态,ESP32 需要通过 GPIO5 将 RESET_N 拉高才能启动 PHY,只有这样才能保证系统的正常上电,否则 ESP32 会存在一定几率进入下载模式(当 REF_CLK_50M 时钟信号在 GPIO0 上电采样阶段刚好处于高电平)。
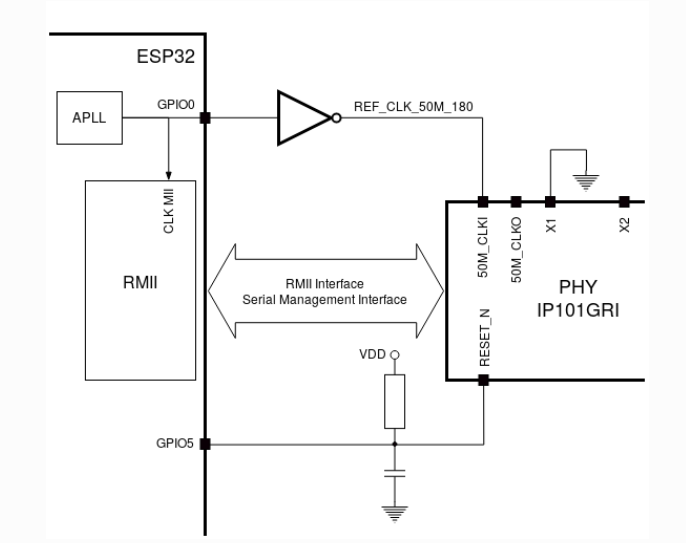
ESP32 APLL 内部提供的 RMII 时钟
另一种选择是从 ESP32 APLL 内部获取 RMII 时钟,请参见下图。来自 GPIO0 的时钟信号先被反相,以解决传输线延迟的问题,然后提供给 PHY。
ESP32 APLL 内部提供的 RMII 时钟
要实现此选项,用户需要在板子上移除或添加一些阻容元器件。有关详细信息,请参见乐鑫低功耗wifi ESP32-Ethernet-Kit V1.2 以太网母板(A 板)原理图,第 2 页,位置 D2。请注意,如果 APLL 已经用于其他用途(如 I2S 外设),那么只能使用外部 RMII 时钟。
GPIO 分配
本节介绍了 ESP32-Ethernet-Kit 开发板特定接口或功能的 GPIO 分配情况。
IP101GRI (PHY) 接口
下表显示了 ESP32 (MAC) 与 IP101GRI (PHY) 的管脚对应关系。ESP32-Ethernet-Kit 的实现默认设置为简化媒体独立接口。
|
No. |
ESP32 管脚 (MAC) |
IP101GRI (PHY) |
|
RMII 接口 |
||
|
1 |
GPIO21 |
TX_EN |
|
2 |
GPIO19 |
TXD[0] |
|
3 |
GPIO22 |
TXD[1] |
|
4 |
GPIO25 |
RXD[0] |
|
5 |
GPIO26 |
RXD[1] |
|
6 |
GPIO27 |
CRS_DV |
|
7 |
GPIO0 |
REF_CLK |
|
串行管理接口 |
||
|
8 |
GPIO23 |
MDC |
|
9 |
GPIO18 |
MDIO |
|
PHY 复位 |
||
|
10 |
GPIO5 |
Reset_N |
注解
乐鑫低功耗wifi ESP32 的 RMII 接口 下的所有管脚分配都是固定的,不能通过 IOMUX 或 GPIO 矩阵进行更改。REF_CLK 仅可选择 GPIO0、GPIO16 或 GPIO17,且不可通过 GPIO 矩阵进行更改。
GPIO Header 1
本连接器包括 ESP32-Ethernet-Kit 开发板上部分不用做他用的 GPIO。
|
No. |
ESP32 管脚 |
|
1 |
GPIO32 |
|
2 |
GPIO33 |
|
3 |
GPIO34 |
|
4 |
GPIO35 |
|
5 |
GPIO36 |
|
6 |
GPIO39 |
GPIO Header 2
根据“说明”描述的不同情形,本连接器包含可用做他用的 GPIO。
|
No. |
ESP32 管脚 |
说明 |
|
1 |
GPIO17 |
见下方说明 1 |
|
2 |
GPIO16 |
见下方说明 1 |
|
3 |
GPIO4 |
|
|
4 |
GPIO2 |
|
|
5 |
GPIO13 |
见下方说明 2 |
|
6 |
GPIO12 |
见下方说明 2 |
|
7 |
GPIO15 |
见下方说明 2 |
|
8 |
GPIO14 |
见下方说明 2 |
|
9 |
GND |
Ground |
|
10 |
3V3 |
3.3 V 电源 |
注解
1、ESP32 芯片的 GPIO16 和 GPIO17 管脚没有引出至 ESP32-WROVER-E 模组的管脚,因此无法使用。如需使用 ESP32 的 GP1016 和 GPIO17 管脚,建议更换其他不含 PSRAM 的模组,比如 ESP32-WROOM-32D 或 ESP32-SOLO-1。
2、具体功能取决与 功能选择开关 的设置。
GPIO 管脚分配总结
|
ESP32-WROVER-E |
IP101GRI |
UART |
JTAG |
GPIO |
Comments |
|
S_VP |
|
|
|
IO36 |
|
|
S_VN |
|
|
|
IO39 |
|
|
IO34 |
|
|
|
IO34 |
|
|
IO35 |
|
|
|
IO35 |
|
|
IO32 |
|
|
|
IO32 |
|
|
IO33 |
|
|
|
IO33 |
|
|
IO25 |
RXD[0] |
|
|
|
|
|
IO26 |
RXD[1] |
|
|
|
|
|
IO27 |
CRS_DV |
|
|
|
|
|
IO14 |
|
|
TMS |
IO14 |
|
|
IO12 |
|
|
TDI |
IO12 |
|
|
IO13 |
|
|
TCK |
IO13 |
|
|
IO15 |
|
|
TDO |
IO15 |
|
|
IO2 |
|
|
|
IO2 |
|
|
IO0 |
REF_CLK |
|
|
|
See note 1 |
|
IO4 |
|
|
|
IO4 |
|
|
IO16 |
|
|
|
IO16 (NC) |
See note 2 |
|
IO17 |
|
|
|
IO17 (NC) |
See note 2 |
|
IO5 |
Reset_N |
|
|
|
See note 1 |
|
IO18 |
MDIO |
|
|
|
|
|
IO19 |
TXD[0] |
|
|
|
|
|
IO21 |
TX_EN |
|
|
|
|
|
RXD0 |
|
RXD |
|
|
|
|
TXD0 |
|
TXD |
|
|
|
|
IO22 |
TXD[1] |
|
|
|
|
|
IO23 |
MDC |
|
|
|
|
注解
1、为防止乐鑫低功耗wifi ESP32 侧 GPIO0 的上电状态受 PHY 侧时钟输出的影响,PHY 侧 RESET_N 默认为低,以关闭 PHY 侧时钟输出。上电后,您可通过 GPIO5 控制 RESET_N 以打开该时钟输出。参见 PHY 侧提供 RMII 时钟。对于无法通过 RESET_N 关闭时钟输出的 PHY,PHY 侧建议使用可在外部禁用/使能的有源晶振。与使用 RESET_N 类似,默认情况下晶振模块应禁用,并在上电后由 ESP32 开启。有关参考设计,请参见 ESP32-Ethernet-Kit V1.2 以太网母板(A 板)原理图。
2、ESP32 芯片的 GPIO16 和 GPIO17 管脚没有引出至 ESP32-WROVER-E 模组的管脚,因此无法使用。如需使用 ESP32 的 GP1016 和 GPIO17 管脚,建议更换其他不含 PSRAM 的模组,比如 ESP32-WROOM-32D 或 ESP32-SOLO-1。
应用程序开发
ESP32-Ethernet-Kit 上电前,请先确认开发板完好无损。
初始设置
1、先请将 以太网母板(A 板) 上的所有开关均拨至 ON 状态,使 功能选择开关 处于默认状态。
2、为了方便应用程序的下载和测试,不要为开发板输入任何信号。
3、此时可以连接 PoE 子板(B 板) ,但不要向 B 板连接任何外部电源。
4、使用 USB 数据线将 以太网母板(A 板) 连接至 PC。
5、将 电源开关 从 GND 拨至 5V0 一侧。此时,5V Power On LED 应点亮。
正式开始开发
现在,请前往 快速入门 中的 详细安装步骤 章节,查看如何设置开发环境,并尝试将示例项目烧录至您的开发板。
请务必在进入下一步前,确保您已完成上述所有步骤。
配置与加载以太网示例
在完成开发环境设置和开发板测试后,您可以配置并烧录 ethernet/basic 示例。本示例专门用于测试以太网功能,支持不同 PHY,包括 ESP32-Ethernet-Kit V1.2(点击放大) 开发板使用的 IP101GRI 。
针对乐鑫低功耗wifi ESP32-Ethernet-Kit V1.1 的主要修改:
更正拨码开关周围 GPIO 编号丝印。
C1、C2、C42 和 C43 更新为 20 pF。详细信息见 ESP32-Ethernet-Kit V1.2 以太网母板(A 板)原理图。
模组 ESP32-WROVER-B 替换为 ESP32-WROVER-E。


地址:深圳市宝安区西乡街道麻布社区宝安互联网产业基地A区6栋7栋7706
版权所有©2020 深圳市飞睿科技有限公司 粤ICP备2020098907号 飞睿科技微波雷达wifi模块网站地图